Monitoring przedziałów wodoszczelnych na ORP "Lech"
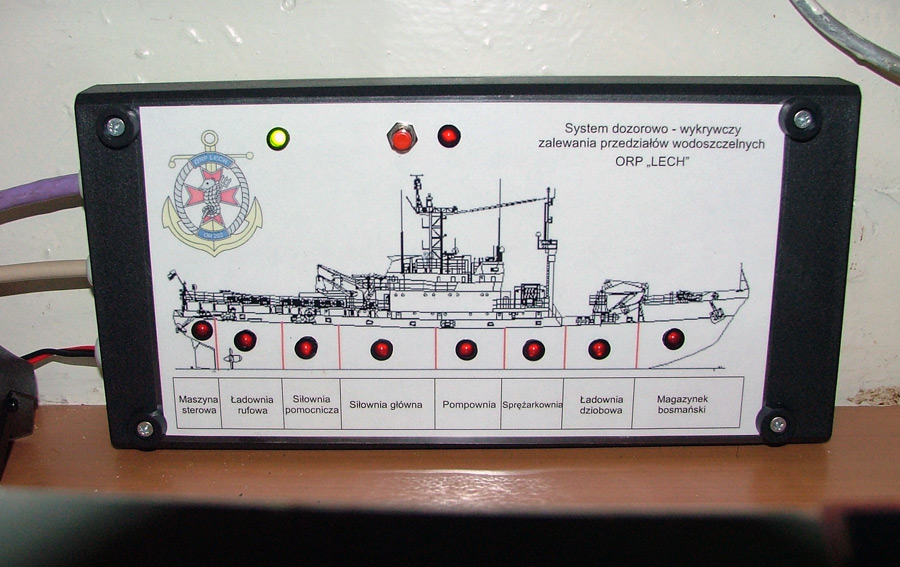
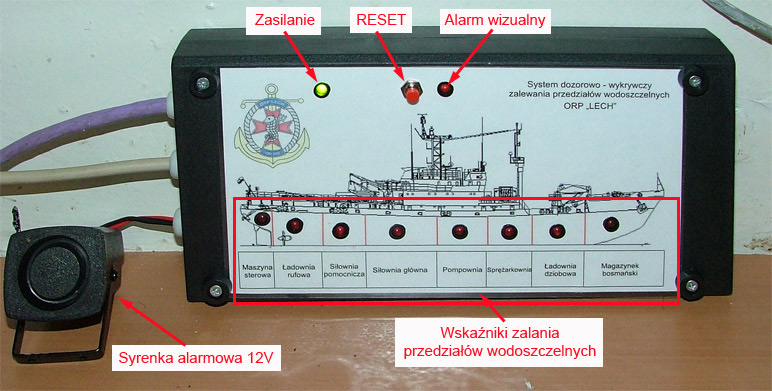
Panel przedni centralki w CSS
Jeden z kolegów z zaprzyjaźnionego pionu eksploatacji [ czyt. mechanik ;) ] zaproponował skonstruowanie urządzenia monitorującego najniżej położone pokłady w przedziałach wodoszczelnych. Urządzenie, które w porę ostrzeże o obecności w nich wody.
Po krótkich konsultacjach powstał zarys systemu dozorowo-wykrywczego zalewania przedziałów wodoszczelnych ORP "Lech".
System składa się z jednostki centralnej i komputera PC (umieszczonych w CSS), tablicy synoptycznej (korytarz główny) i ośmiu modułów umiejscowionych w następujących przedziałach wodoszczelnych okrętu:
- maszyna sterowa;
- ładownia rufowa;
- siłownia pomocnicza;
- siłownia główna;
- pompownia;
- sprężarkownia;
- ładownia dziobowa;
- magazynek bosmański.

Centrala systemu w CSS

Moduł przedziałowy w siłowni pomocniczej

Moduł przedziałowy w maszynie sterowej
Zasada działania
Moduły przedziałowe umieszczone w przedziałach wodoszczelnych w sposób ciągły monitorują stan czujników zalania. Ze względu na kołysanie okrętu zrezygnowano z mechanicznych czujników wychyleniowo-wypornościowych i zastosowano elektroniczne czujniki rezystancyjne, niepodatne na wibracje i zmiany położenia.
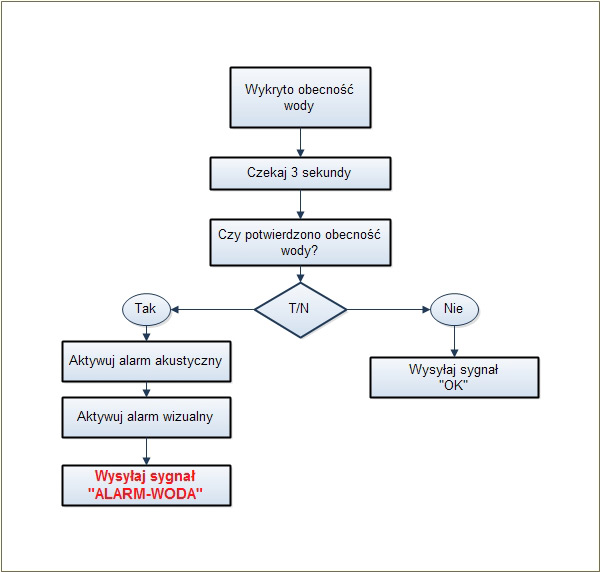
Algorytm działania modułu przedziałowego
W momencie wykrycia wody przez czujnik moduł odczekuje 3 sekundy, po czym ponownie bada stan czujnika. Jeżeli po tym czasie czujnik nadal wskazuje obecność wody (zalanie) wówczas w module aktywuje się alarm akustyczny i wizualny (naprzemienne włączanie i wyłączanie diody LED i buzzera z częstotliwością 4 Hz). Zastosowanie czasu zwłoki pozwoliło wyeliminować fałszywe alarmy związane z chwilowym zalaniem czujnika (np. podczas kołysania okrętu). Alarm można skasować tylko po całkowitym osuszeniu czujników.
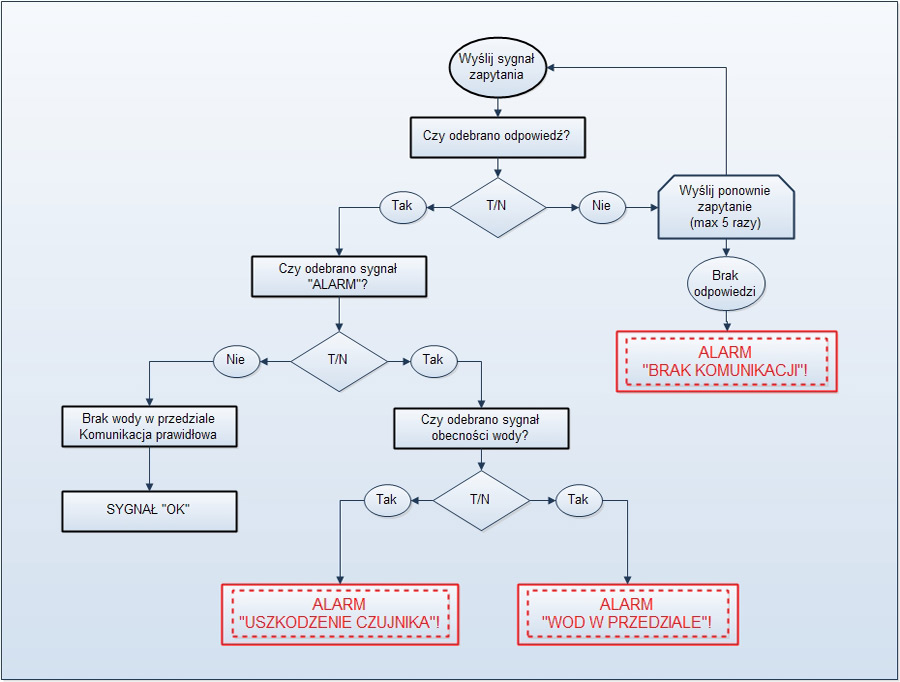
Algorytm działania centrali alarmowej
Jednostka centralna w sposób cykliczny wysyła sygnały zapytania do poszczególnych modułów przedziałowych i oczekuje na sygnał odpowiedzi. System do transmisji sygnałów wykorzystuje różnicowy standard transmisji szeregowej RS485. Dodatkowo jako zabezpieczenie przed zakłóceniami pochodzenia indukcyjnego zastosowano ekranowany kabel sygnałowy U/FTP. Jeżeli w odpowiedzi na sygnał zapytania jednostka centralna otrzyma alarm obecności wody w przedziale, wówczas włącza alarm akustyczny (syrenka alarmowa 12V) i zapala diodę informującą w którym przedziale nastąpiło zalanie.
W przypadku awarii któregokolwiek z modułów przedziałowych jednostka centralna po sygnale zapytania nie otrzyma odpowiedzi. Wówczas po 1 sekundzie ponownie wysyła sygnał zapytania do tego samego modułu. Po pięciokrotnym braku odpowiedzi od uszkodzonego modułu jednostka centralna przekazuje sygnał o braku komunikacji z uszkodzonym modułem.
Wszystkie alarmy przekazywane są do komputera PC umieszczonego w CSS, na którym zainstalowano aplikację umożliwiającą monitorowanie pracy systemu. Aplikacja zapisuje w logu czas włączenia systemu, czas jego wyłączenia, na bieżąco pokazuje stan pracy modułów przedziałowych a także zapisuje w pamięci czas, miejsce i rodzaj zgłoszonego alarmu.
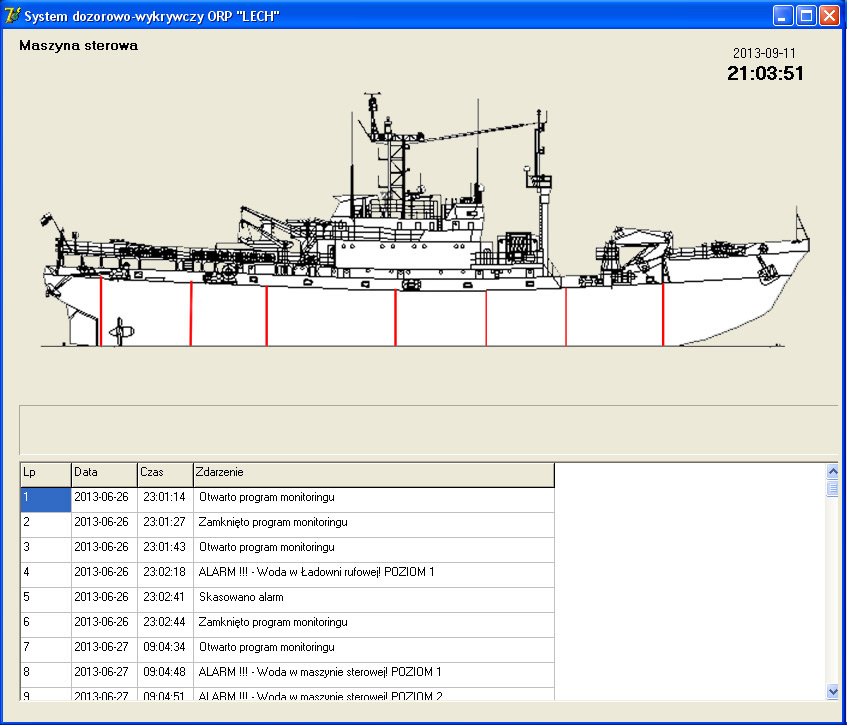
Strona główna aplikacji w komputerze w CSS
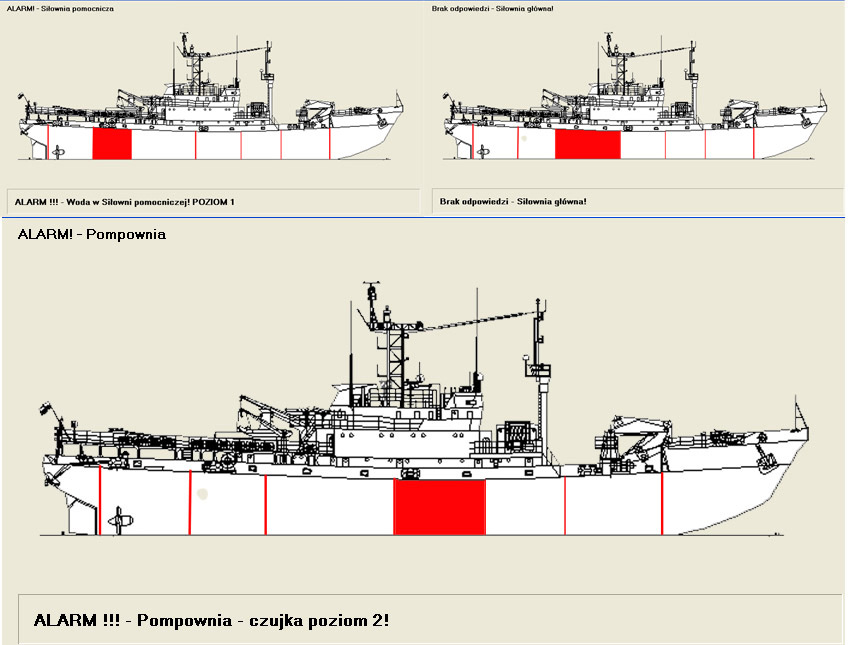
Wygląd aplikacji w czasie wystąpienia alarmu
System umożliwia identyfikację następujących zdarzeń:
- Zalanie przedziału wodoszczelnego (3 poziomy wody w przedziale);
- Uszkodzenie modułu przedziałowego (brak komunikacji);
- Uszkodzenie czujników w module przedziałowym ( 3 poziomy ).
Jak to powstało?
System składa się z dziewięciu identycznych modułów umieszczonych w przedziałach wodoszczelnych, oraz dwóch modułów centralek, z których jedna (umieszczona w CSS) pracuje jako moduł główny systemu, a druga (umieszczona na korytarzu głównym przy dyżyrce) jako tablica synoptyczna wskazująca miejsce wystąpienia alarmu i uruchamiająca sygnalizację akustyczną.
Po dopracowaniu schematu przystąpiłem do masowej produkcji płytek PCB ;)
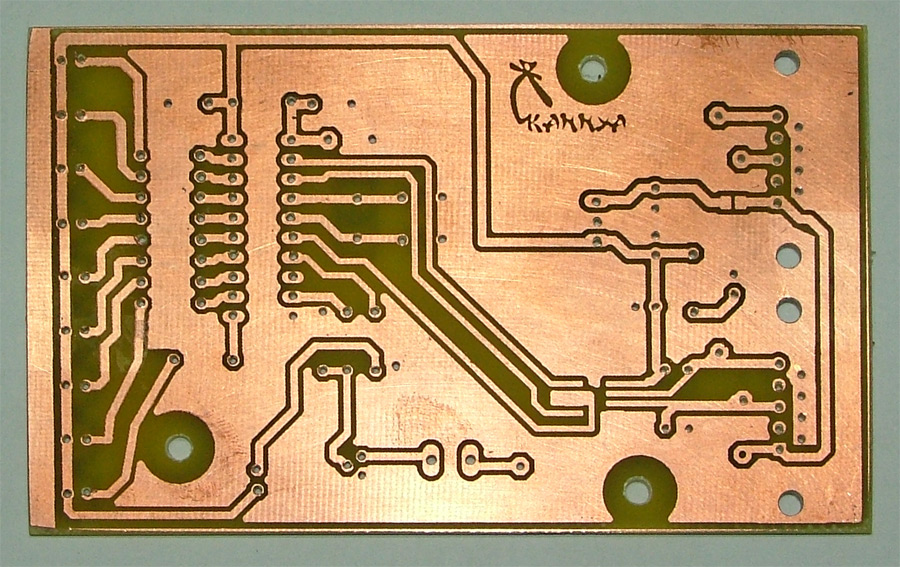
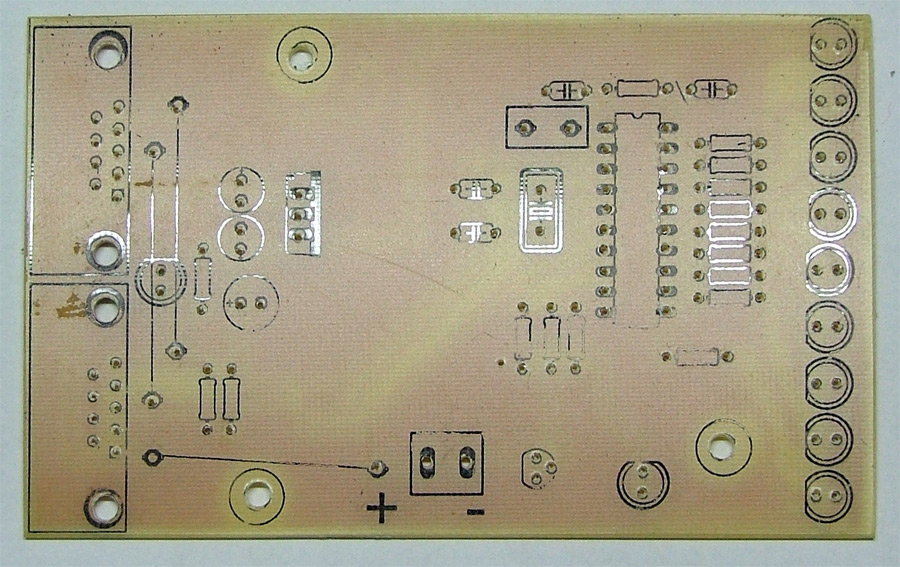
Płytka modułów przedziałowych:
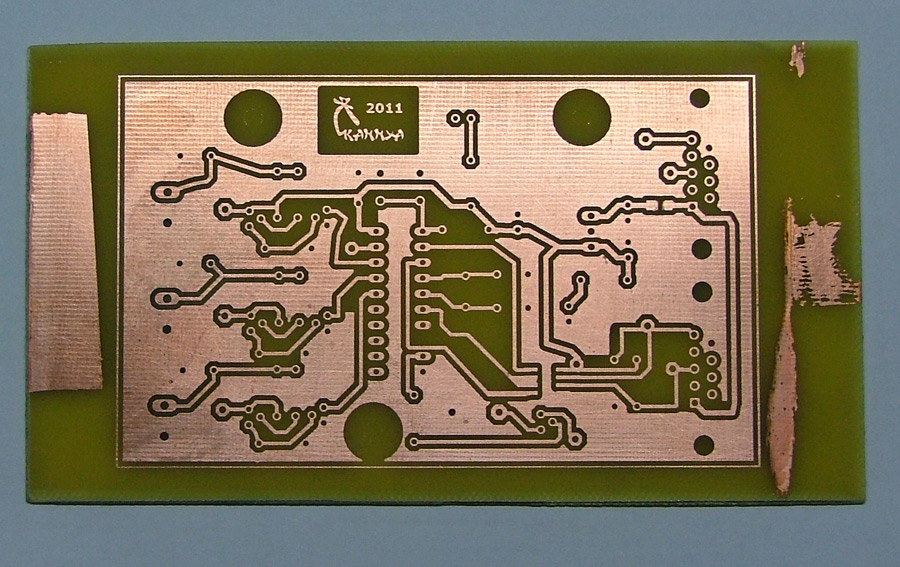
Płytka modułu - strona ścieżek
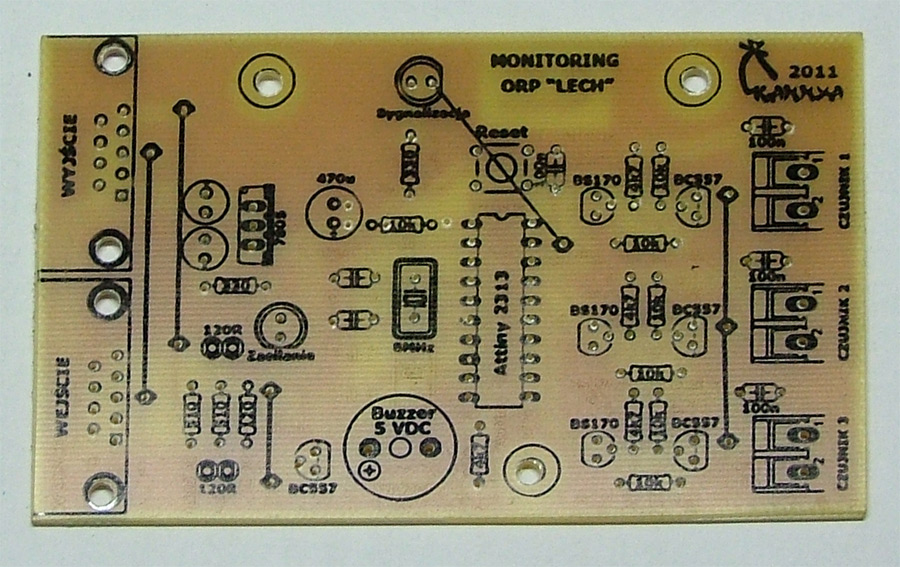
Płytka modułu - strona elementów
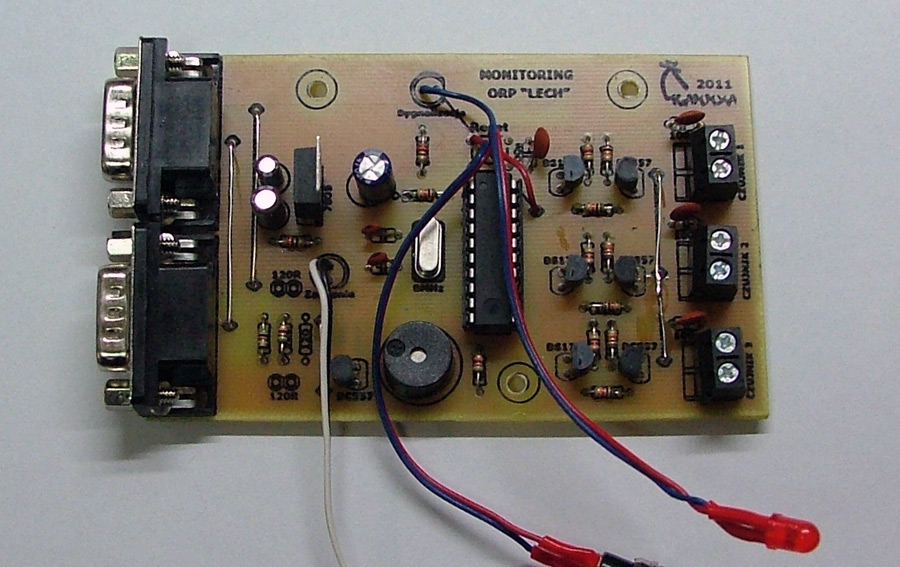
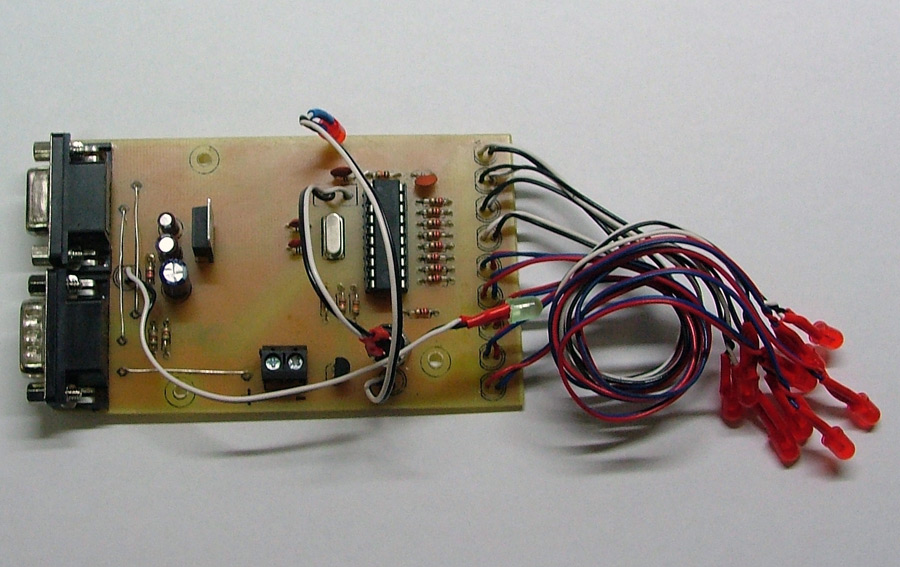
Płytka modułu - całość
Płytka centrali i tablicy synoptycznej:
Płytka centralki - strona ścieżek
Płytka centralki - strona elementów
Płytka centralki - całość
Po zmontowaniu wszystkich płytek nastąpiła dłuuuuga faza testów. W tym czasie koledzy doprowadzili przewody do wszystkich przedziałów, na dyżurkę i do CSS.
Kilka słów o systemie.
Sercem zarówno modułów jak i centralek jest mikrokontroler AVR ATtiny 2313 firmy Atmel. Tani, ogólnodostępny układ posiadający moduł UART. Programy modułów i centralek zostały napisane w języku C. Korzystałem ze środowiska Eclipse.
Płytki zaprojektowałem w darmowej wersji Eagle'a, następnie termotransfer i wytrawianie. (Projekty urządzeń wykorzystanych do produkcji PCB znajdują się w dziale "Elektronika"). "Wyprodukowanie" podzespołów zajęło mi ponad pół roku. Ostateczne podłączenie i uruchomienie kolejnych sześć miesięcy. Jednak opłacało się! System został zamontowany, przetestowany i uruchomiony. Wspomaga dzielną załogę najlepszego okrętu RP. Dostałem sygnały, że sprawdził się - w porę zaalarmował o zbierającej się wodzie :)
Poniżej kilka zdjęć przedstawiających elementy systemu:
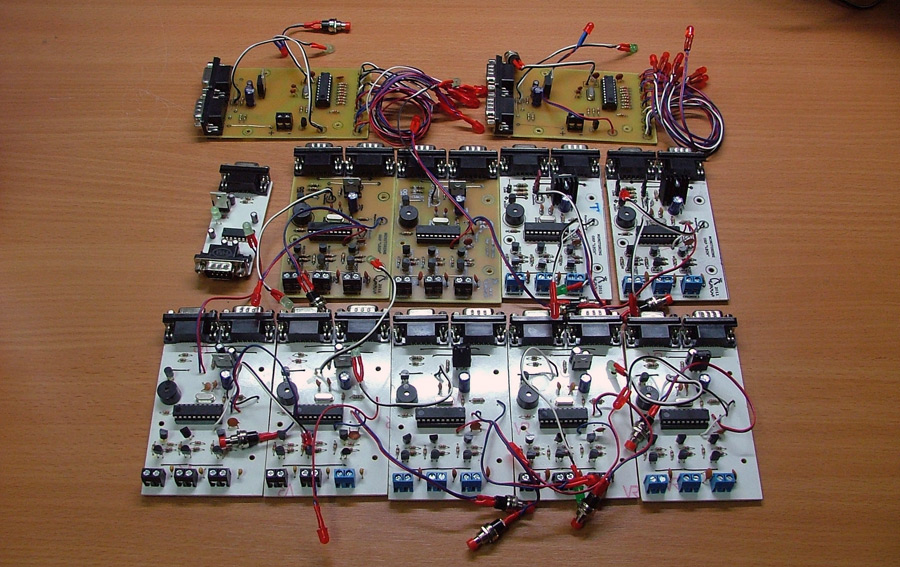
Komplet podzespołów przed zamontowaniem na okręcie
Centrala systemu w CSS

Moduł zamontowany w ładowni dziobowej okrętu
Z powodu wykorzystania syrenek alarmów samochodowych generujących głośny sygnał akustyczny aktywowanego alarmu nie da się zignorować. System zmusza służbę dyżurną do udania się w miejsce alarmu. Samo skasowanie alarmu na tablicy synoptycznej bądź w CSS bez skasowania sygnału w przedziale nic nie da. Po 10 sekundach (kolejny cykl odpytywania modułów) alarm zostanie ponownie aktywowany.
Dopiero po udaniu się do przedziału, gdzie powstał alarm, upewnieniu się, że nie ma wody (koniecznie trzeba sprawdzić i osuszyć czujki), można skasować alarm w przedziale. Dopiero po tym można zresetować system. Wszelkie wystąpienia alarmów zapisywane są w logu aplikacji zainstalowanej na komputerze w CSS. Aplikację napisałem w Delphi. Jej opis znaleźć można w dziale "Programowanie -> Monitoring".
